From Surf Wiki (app.surf) — the open knowledge base
Toroidal and poloidal coordinates
Coordinate system relative to a torus
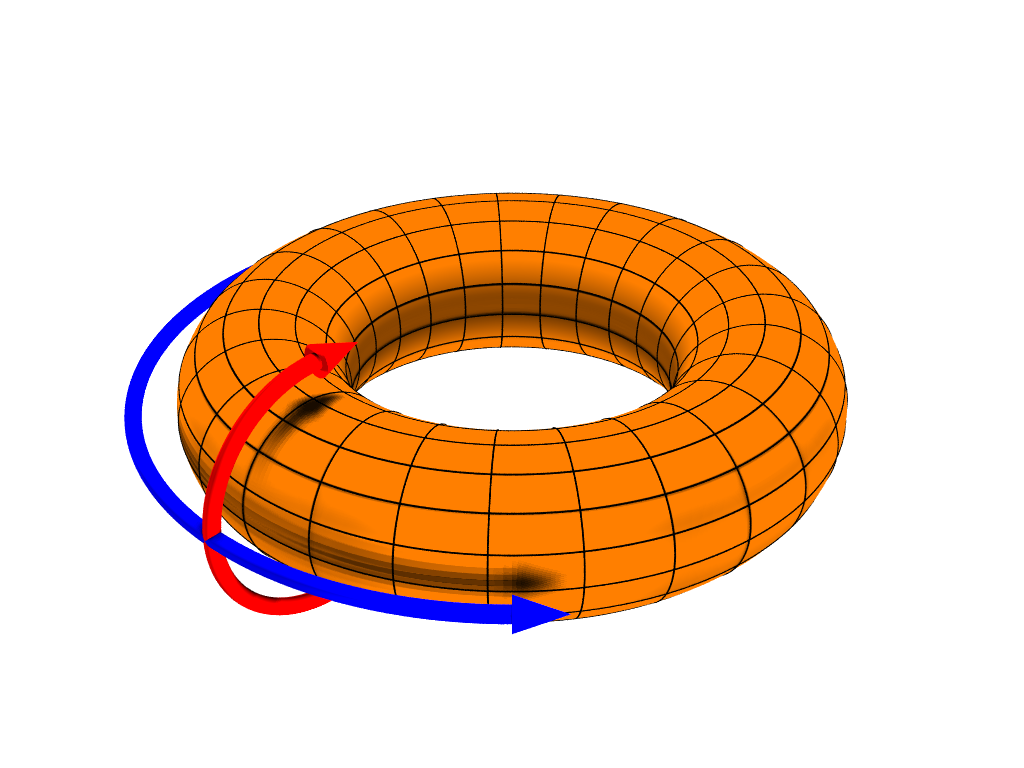
Coordinate system relative to a torus
The terms toroidal and poloidal refer to directions relative to a torus of reference. They describe a three-dimensional coordinate system in which the poloidal direction follows a small circular ring around the surface, while the toroidal direction follows a large circular ring around the torus, encircling the central void.
The earliest use of these terms cited by the Oxford English Dictionary is by Walter M. Elsasser (1946) in the context of the generation of the Earth's magnetic field by currents in the core, with "toroidal" being parallel to lines of constant latitude and "poloidal" being in the direction of the magnetic field (i.e. towards the poles).
The OED also records the later usage of these terms in the context of toroidally confined plasmas, as encountered in magnetic confinement fusion. In the plasma context, the toroidal direction is the long way around the torus, the corresponding coordinate being denoted by z in the slab approximation or ζ or φ in magnetic coordinates; the poloidal direction is the short way around the torus, the corresponding coordinate being denoted by y in the slab approximation or θ in magnetic coordinates. (The third direction, normal to the magnetic surfaces, is often called the "radial direction", denoted by x in the slab approximation and variously ψ, χ, r, ρ, or s in magnetic coordinates.)
Example
As a simple example from the physics of magnetically confined plasmas, consider an axisymmetric system with circular, concentric magnetic flux surfaces of radius r (a crude approximation to the magnetic field geometry in an early tokamak but topologically equivalent to any toroidal magnetic confinement system with nested flux surfaces) and denote the toroidal angle by \zeta and the poloidal angle by \theta. Then the toroidal/poloidal coordinate system relates to standard Cartesian coordinates by these transformation rules:
: x = (R_0 +r \cos \theta) \cos\zeta
: y = s_\zeta (R_0 + r \cos \theta) \sin\zeta
: z = s_\theta r \sin \theta.
where s_\theta = \pm 1, s_\zeta = \pm 1.
The natural choice geometrically is to take s_\theta = s_\zeta = +1, giving the toroidal and poloidal directions shown by the arrows in the figure above, but this makes r,\theta,\zeta a left-handed curvilinear coordinate system. As it is usually assumed in setting up flux coordinates for describing magnetically confined plasmas that the set r,\theta,\zeta forms a right-handed coordinate system, \nabla r\cdot\nabla\theta\times\nabla\zeta 0, we must either reverse the poloidal direction by taking s_\theta = -1, s_\zeta = +1, or reverse the toroidal direction by taking s_\theta = +1, s_\zeta = -1. Both choices are used in the literature.
Kinematics
To study single particle motion in toroidally confined plasma devices, velocity and acceleration vectors must be known. Considering the natural choice s_\theta = s_\zeta = +1, the unit vectors of toroidal and poloidal coordinates system \left(r,\theta,\zeta\right) can be expressed as:
: \mathbf{e}r = \begin{pmatrix} \cos\theta \cos\zeta \ \cos\theta \sin\zeta \ \sin\theta \end{pmatrix} \quad \mathbf{e}\theta = \begin{pmatrix} -\sin\theta \cos\zeta \ -\sin\theta \sin\zeta \ \cos\theta \end{pmatrix} \quad \mathbf{e}_\zeta = \begin{pmatrix} -\sin\zeta \ \cos\zeta \ 0 \end{pmatrix}
according to Cartesian coordinates. The position vector is expressed as:
: \mathbf{r} = \left( r + R_0 \cos\theta \right) \mathbf{e}r - R_0 \sin\theta \mathbf{e}\theta
The velocity vector is then given by:
: \mathbf{\dot{r}} = \dot{r} \mathbf{e}r + r\dot{\theta} \mathbf{e}\theta + \dot{\zeta} \left( R_0 + r \cos\theta \right) \mathbf{e}_\zeta
and the acceleration vector is:
: \begin{align} \mathbf{\ddot{r}} = {} & \left( \ddot{r} - r \dot{\theta}^2 - r \dot{\zeta}^2 \cos^2\theta - R_0 \dot{\zeta}^2 \cos\theta \right) \mathbf{e}r \[5pt] & {} + \left( 2\dot{r}\dot{\theta} + r\ddot{\theta} + r\dot{\zeta}^2\cos\theta\sin\theta + R_0 \dot{\zeta}^2 \sin\theta \right) \mathbf{e}\theta \[5pt] & {} + \left( 2 \dot{r}\dot{\zeta}\cos\theta - 2 r \dot{\theta}\dot{\zeta} \sin\theta + \ddot{\zeta} \left( R_0 + r\cos\theta \right) \right) \mathbf{e}_\zeta \end{align}
References
This article was imported from Wikipedia and is available under the Creative Commons Attribution-ShareAlike 4.0 License. Content has been adapted to SurfDoc format. Original contributors can be found on the article history page.
Ask Mako anything about Toroidal and poloidal coordinates — get instant answers, deeper analysis, and related topics.
Research with MakoFree with your Surf account
Create a free account to save articles, ask Mako questions, and organize your research.
Sign up freeThis content may have been generated or modified by AI. CloudSurf Software LLC is not responsible for the accuracy, completeness, or reliability of AI-generated content. Always verify important information from primary sources.
Report