From Surf Wiki (app.surf) — the open knowledge base
Polyhedron
Flat-sided three-dimensional shape

Flat-sided three-dimensional shape
| Field | Value | |||
|---|---|---|---|---|
| title | Examples of polyhedra | |||
| image | {{multiple image | border=infobox | perrow=2/2/2 | total_width=350 |
| image1 | Tetrahedron (green).png | |||
| caption1 | Regular tetrahedron | |||
| (Platonic solid) | ||||
| image2 | Small stellated dodecahedron.png | |||
| caption2 | Small stellated dodecahedron | |||
| (Kepler–Poinsot polyhedron) | ||||
| image3 | Icosidodecahedron.png | |||
| caption3 | Icosidodecahedron | |||
| (Archimedean solid) | ||||
| image4 | Great cubicuboctahedron.png | |||
| caption4 | Great cubicuboctahedron | |||
| (Uniform star-polyhedron) | ||||
| image5 | Rhombic triacontahedron.png | |||
| caption5 | Rhombic triacontahedron | |||
| (Catalan solid) | ||||
| image6 | Hexagonal torus.svg | |||
| caption6 | A toroidal polyhedron | |||
| label1 | Definition | |||
| data1 | A three-dimensional example of the more general polytope in any number of dimensions. | |||
| label2 | Characteristics | |||
| data2 | number of faces, | |||
| topological classification and Euler characteristic, | ||||
| duality, | ||||
| vertex figures, | ||||
| surface area and volume, | ||||
| lines as in geodesics and diagonals, | ||||
| Dehn invariant, | ||||
| symmetry group. |
(Platonic solid) (Kepler–Poinsot polyhedron) (Archimedean solid) (Uniform star-polyhedron) (Catalan solid) topological classification and Euler characteristic, duality, vertex figures, surface area and volume, lines as in geodesics and diagonals, Dehn invariant, symmetry group.
In geometry, a polyhedron (: polyhedra or polyhedrons; ) is a three-dimensional figure with flat polygonal faces, straight edges and sharp corners or vertices. The term "polyhedron" may refer either to a solid figure or to its boundary surface. The terms solid polyhedron and polyhedral surface are commonly used to distinguish the two concepts.{{citation | title-link = Convex Polyhedra (book)
There are many definitions of polyhedra, not all of which are equivalent. Under any definition, polyhedra are typically understood to generalize two-dimensional polygons and to be the three-dimensional specialization of polytopes (a more general concept in any number of dimensions). Polyhedra have several general characteristics that include the number of faces, topological classification by Euler characteristic, duality, vertex figures, surface area, volume, interior lines, Dehn invariant, and symmetry. A symmetry of a polyhedron means that the polyhedron's appearance is unchanged by the transformation such as rotating and reflecting.
The convex polyhedra are a well defined class of polyhedra with several equivalent standard definitions. Every convex polyhedron is the convex hull of its vertices, and the convex hull of a finite set of points is a polyhedron. Many common families of polyhedra, such as cubes and pyramids, are convex.
Definition
Convex polyhedra are well-defined, with several equivalent standard definitions. However, the formal mathematical definition of polyhedra that are not required to be convex has been problematic. Many definitions of "polyhedron" have been given within particular contexts,{{citation | orig-date = 1976 Some of these definitions exclude shapes that have often been counted as polyhedra (such as the self-crossing polyhedra) or include shapes that are often not considered as valid polyhedra (such as solids whose boundaries are not manifolds). And although several of these definitions explicitly require the number of faces of a polyhedron to be finite, shapes with infinitely many faces such as the skew apeirohedra have also been called polyhedra. As Branko Grünbaum observed, | editor1-last = Bisztriczky | editor1-first = Tibor | editor2-last = McMullen | editor2-first = Peter | editor3-last = Schneider|editor3-first = Rolf | editor4-last = Weiss | editor4-first = A. Nevertheless, there is general agreement that a polyhedron is a solid or surface that can be described by its vertices (corner points), edges (line segments connecting certain pairs of vertices), faces (two-dimensional polygons), and that it sometimes can be said to have a particular three-dimensional interior volume. One can distinguish among these different definitions according to whether they describe the polyhedron as a solid, whether they describe it as a surface, or whether they describe it more abstractly based on its incidence geometry.
- A common and somewhat naive definition of a polyhedron is that it is a solid whose boundary can be covered by finitely many planes or that it is a solid formed as the union of finitely many convex polyhedra. Natural refinements of this definition require the solid to be bounded, to have a connected interior, and possibly also to have a connected boundary. The faces of such a polyhedron can be defined as the connected components of the parts of the boundary within each of the planes that cover it, and the edges and vertices as the line segments and points where the faces meet. However, the polyhedra defined in this way do not include the self-crossing star polyhedra, whose faces may not form simple polygons, and some of whose edges may belong to more than two faces.
- Definitions based on the idea of a bounding surface rather than a solid are also common.{{citation | author-link = Branko Grünbaum | contribution-url = https://sites.math.washington.edu/~grunbaum/BG225.Acoptic%20polyhedra.pdf | access-date = 2022-07-01 | archive-date = 2021-08-30 | archive-url = https://web.archive.org/web/20210830211936/https://sites.math.washington.edu/~grunbaum/BG225.Acoptic%20polyhedra.pdf | url-status = dead

- One modern approach is based on the theory of abstract polyhedra. These can be defined as partially ordered sets whose elements are the vertices, edges, and faces of a polyhedron. A vertex or edge element is less than an edge or face element (in this partial order) when the vertex or edge is part of the edge or face. Additionally, one may include a special bottom element of this partial order (representing the empty set) and a top element representing the whole polyhedron. If the sections of the partial order between elements three levels apart (that is, between each face and the bottom element, and between the top element and each vertex) have the same structure as the abstract representation of a polygon, then these partially ordered sets carry exactly the same information as a topological polyhedron. However, these requirements are often relaxed, to instead require only that sections between elements two levels apart have the same structure as the abstract representation of a line segment.{{citation
In all of these definitions, a polyhedron is typically understood as a three-dimensional example of the more general polytope in any number of dimensions. For example, a polygon has a two-dimensional body and no faces, while a 4-polytope has a four-dimensional body and an additional set of three-dimensional "cells". However, some of the literature on higher-dimensional geometry uses the term "polyhedron" to mean something else: not a three-dimensional polytope, but a shape that is different from a polytope in some way. For instance, some sources define a convex polyhedron to be the intersection of finitely many half-spaces, and a polytope to be a bounded polyhedron.{{citation | title-link = Convex Polytopes | contribution-url = https://books.google.com/books?id=pbgg1pFxW8YC&pg=PA5
General characteristics
Number of faces
Polyhedra may be classified and are often named according to the number of faces. The naming system is based on Classical Greek, and combines a prefix counting the faces with the suffix "hedron", meaning "base" or "seat" and referring to the faces. For example a tetrahedron is a polyhedron with four faces, a pentahedron is a polyhedron with five faces, a hexahedron is a polyhedron with six faces, etc. For a complete list of the Greek numeral prefixes see , in the column for Greek cardinal numbers. The names of tetrahedra, hexahedra, octahedra (eight-sided polyhedra), dodecahedra (twelve-sided polyhedra), and icosahedra (twenty-sided polyhedra) are sometimes used without additional qualification to refer to the Platonic solids, and sometimes used to refer more generally to polyhedra with the given number of sides without any assumption of symmetry.
Topological classification
Main article: Toroidal polyhedron, Euler characteristic

Some polyhedra have two distinct sides to their surface. For example, the inside and outside of a convex polyhedron paper model can each be given a different colour (although the inside colour will be hidden from view). These polyhedra are orientable. The same is true for non-convex polyhedra without self-crossings. Some non-convex self-crossing polyhedra can be coloured in the same way but have regions turned "inside out" so that both colours appear on the outside in different places; these are still considered to be orientable. However, for some other self-crossing polyhedra with simple-polygon faces, such as the tetrahemihexahedron, it is not possible to colour the two sides of each face with two different colours so that adjacent faces have consistent colours. In this case the polyhedron is said to be non-orientable. For polyhedra with self-crossing faces, it may not be clear what it means for adjacent faces to be consistently coloured, but for these polyhedra it is still possible to determine whether it is orientable or non-orientable by considering a topological cell complex with the same incidences between its vertices, edges, and faces.{{citation
A more subtle distinction between polyhedron surfaces is given by their Euler characteristic, which combines the numbers of vertices V, edges E, and faces F of a polyhedron into a single number \chi defined by the formula :\chi=V-E+F.\ The same formula is also used for the Euler characteristic of other kinds of topological surfaces. It is an invariant of the surface, meaning that when a single surface is subdivided into vertices, edges, and faces in more than one way, the Euler characteristic will be the same for these subdivisions. For a convex polyhedron, or more generally any simply connected polyhedron with the surface of a topological sphere, it always equals 2. For more complicated shapes, the Euler characteristic relates to the number of toroidal holes, handles or cross-caps in the surface and will be less than 2.{{citation | title-link = Euler's Gem All polyhedra with odd-numbered Euler characteristics are non-orientable. A given figure with even Euler characteristic may or may not be orientable. For example, the one-holed toroid and the Klein bottle both have \chi = 0, with the first being orientable and the other not.
For many (but not all) ways of defining polyhedra, the surface of the polyhedron is required to be a manifold. This means that every edge is part of the boundary of exactly two faces (disallowing shapes like the union of two cubes that meet only along a shared edge) and that every vertex is incident to a single alternating cycle of edges and faces (disallowing shapes like the union of two cubes sharing only a single vertex). For polyhedra defined in these ways, the classification of manifolds implies that the topological type of the surface is completely determined by the combination of its Euler characteristic and orientability. For example, every polyhedron whose surface is an orientable manifold and whose Euler characteristic is 2 must be a topological sphere.
A toroidal polyhedron is a polyhedron whose Euler characteristic is less than or equal to 0, or equivalently whose genus is 1 or greater. Topologically, the surfaces of such polyhedra are torus surfaces having one or more holes through the middle. A notable example is the Szilassi polyhedron, which geometrically realizes the Heawood map. A polyhedron with the symmetries of a regular polyhedron and with genus more than one is a Leonardo polyhedron.{{cite journal | doi-access = free
Duality
Main article: Dual polyhedron

For every convex polyhedron, there exists a dual polyhedron having
- faces in place of the original's vertices and vice versa, and
- the same number of edges. The dual of a convex polyhedron can be obtained by the process of polar reciprocation.{{citation | title-link = Mathematical Models (Cundy and Rollett) | author1-link = Branko Grünbaum | author2-link = Geoffrey Colin Shephard | access-date = 2017-02-21 | archive-url = https://web.archive.org/web/20170222114014/http://www.wias-berlin.de/people/si/course/files/convex_polytopes-survey-Gruenbaum.pdf | archive-date = 2017-02-22
Abstract polyhedra also have duals, obtained by reversing the partial order defining the polyhedron to obtain its dual or opposite order. These have the same Euler characteristic and orientability as the initial polyhedron. However, this form of duality does not describe the shape of a dual polyhedron, but only its combinatorial structure. For some definitions of non-convex geometric polyhedra, there exist polyhedra whose abstract duals cannot be realized as geometric polyhedra under the same definition.
Vertex figures
Main article: Vertex figure
For every vertex one can define a vertex figure, which describes the local structure of the polyhedron around the vertex. Precise definitions vary, but a vertex figure can be thought of as the polygon exposed where a slice through the polyhedron cuts off a vertex. but other polyhedra may not have a plane through these points. For convex polyhedra, and more generally for polyhedra whose vertices are in convex position, this slice can be chosen as any plane separating the vertex from the other vertices.{{citation | doi-access = free | editor1-last = Swart | editor1-first = David | editor2-last = Séquin | editor2-first = Carlo H. | editor3-last = Fenyvesi | editor3-first = Kristóf | contribution-url = https://archive.bridgesmathart.org/2017/bridges2017-17.html | doi-access = free
Surface area and lines inside polyhedra
The surface area of a polyhedron is the sum of the areas of its faces, for definitions of polyhedra for which the area of a face is well-defined. The geodesic distance between any two points on the surface of a polyhedron measures the length of the shortest curve that connects the two points, remaining within the surface. By Alexandrov's uniqueness theorem, every convex polyhedron is uniquely determined by the metric space of geodesic distances on its surface. However, non-convex polyhedra can have the same surface distances as each other, or the same as certain convex polyhedra.{{citation
When a line segment connect two vertices that are not in the same face, it forms a diagonal line of the polyhedron.{{citation
Volume
Polyhedral solids have an associated quantity called volume that measures how much space they occupy. Simple families of solids may have simple formulas for their volumes; for example, the volumes of pyramids, prisms, and parallelepipeds can easily be expressed in terms of their edge lengths or other coordinates. (See Volume § Volume formulas for a list that includes many of these formulas.)
Volumes of more complicated polyhedra may not have simple formulas. The volumes of such polyhedra may be computed by subdividing the polyhedron into smaller pieces (for example, by triangulation). For example, the volume of a Platonic solid can be computed by dividing it into congruent pyramids, with each pyramid having a face of the polyhedron as its base and the centre of the polyhedron as its apex.
In general, it can be derived from the divergence theorem that the volume of a polyhedral solid is given by \frac{1}{3} \left| \sum_F (Q_F \cdot N_F) \operatorname{area}(F) \right|, where the sum is over faces F of the polyhedron, Q_F is an arbitrary point on face F , N_F is the unit vector perpendicular to F pointing outside the solid, and the multiplication dot is the dot product. In higher dimensions, volume computation may be challenging, in part because of the difficulty of listing the faces of a convex polyhedron specified only by its vertices, and there exist specialized algorithms to determine the volume in these cases.
Dehn invariant
Main article: Dehn invariant
In two dimensions, the Bolyai–Gerwien theorem asserts that any polygon may be transformed into any other polygon of the same area by cutting it up into finitely many polygonal pieces and rearranging them. The analogous question for polyhedra was the subject of Hilbert's third problem. Max Dehn solved this problem by showing that, unlike in the 2-D case, there exist polyhedra of the same volume that cannot be cut into smaller polyhedra and reassembled into each other. To prove this Dehn discovered another value associated with a polyhedron, the Dehn invariant, such that two polyhedra can only be dissected into each other when they have the same volume and the same Dehn invariant. It was later proven by Sydler that this is the only obstacle to dissection: every two Euclidean polyhedra with the same volumes and Dehn invariants can be cut up and reassembled into each other. The Dehn invariant is not a number, but a vector in an infinite-dimensional vector space, determined from the lengths and dihedral angles of a polyhedron's edges.
Another of Hilbert's problems, Hilbert's eighteenth problem, concerns (among other things) polyhedra that tile space. Every such polyhedron must have Dehn invariant zero.{{citation
Net
Main article: Net (polyhedron)

The faces of some polyhedra can be unfolded into an arrangement of non-overlapping edge-joined polygons in the plane. Such an arrangement is known as a net of the polyhedron. Nets can be used to construct polyhedron models from paper or other flexible materials.{{citation
Symmetries
Many of the most studied polyhedra are highly symmetrical. Their appearance is unchanged by some reflection by plane or rotation around the axes passing through two opposite vertices, edges, or faces in space. Each symmetry may change the location of a given element, but the set of all vertices (likewise faces and edges) is unchanged. The collection of symmetries of a polyhedron is called its symmetry group.{{citation | editor-last1 = Aleksandrov | editor-first1 = A. D. | editor-last2 = Kolmogorov | editor-first2 = A. N. | editor-last3 = Lavrent'ev | editor-first3 = M. A.
By elements of polyhedron
All the elements (vertex, face, and edge) that can be superimposed on each other by symmetries are said to form a symmetry orbit. If these elements lie in the same orbit, the figure may be transitive on the orbit. Individually, they are isohedral (or face-transitive, meaning the symmetry transformations involve the polyhedra's faces in orbit),{{citation | contribution-url = https://books.google.com/books?id=OToVjZW9CKMC&pg=PA12 | editor-last = Jarić | editor-first = Marko

When three such symmetries belong to a polyhedron, it is known as a regular polyhedron. There are nine regular polyhedra: five Platonic solids (cube, octahedron, icosahedron, tetrahedron, and dodecahedron—all of which have regular polygonal faces) and four Kepler–Poinsot polyhedrons. Nevertheless, some polyhedrons may not possess one or two of those symmetries:
- A polyhedron that is vertex-transitive and edge-transitive is said to be quasiregular; they have regular faces, and their duals are face-transitive and edge-transitive.
- A vertex- but not edge-transitive polyhedron with regular polygonal faces is said to be semiregular. This includes the prisms and antiprisms. The dual of a semiregular polyhedron is face-transitive, and every vertex is regular.
- A vertex-transitive polyhedron with regular polygonal faces is said to be uniform. This class includes the regular, quasi-regular, and semi-regular polyhedra. The definition may be applied to both convex and star polyhedra. The dual of a uniform polyhedron is face-transitive and has regular vertices but is not necessarily vertex-transitive. The uniform polyhedra and their duals are traditionally classified according to their degree of symmetry, and whether they are convex or not.
- A face- and vertex-transitive (but not necessarily edge-transitive) polyhedron is said to be noble. The regular polyhedra are also noble; they are the only noble uniform polyhedra. The duals of noble polyhedra are themselves noble.
Some polyhedra have no reflection symmetry, so that they have two enantiomorph forms, which are reflections of each other. Examples include the snub cuboctahedron and snub icosidodecahedron. In this case the polyhedron is said to be chiral.
By point group in three dimensions
Main article: Point groups in three dimensions
The point group of polyhedra means a mathematical group endowed with its symmetry operations so that the appearance of polyhedra remains preserved while transforming in three-dimensional space. The indicated transformation here includes the rotation around the axes, reflection through the plane, inversion through a center point, and a combination of these three.{{citation

The polyhedral group is the symmetry group originally derived from the three Platonic solids: tetrahedron, octahedron, and icosahedron. These three have point groups respectively known as tetrahedral symmetry, octahedral symmetry, and icosahedral symmetry. Each of these focuses on the rotation group of polyhedra, known as the chiral polyhedral group, whereas the additional reflection symmetry is known as the full polyhedral group. One point group, pyritohedral symmetry, includes the rotation of tetrahedral symmetry and additionally has three planes of reflection symmetry and some rotoreflections. Overall, the mentioned polyhedral groups are summarized in the following bullets:{{citation
- chiral tetrahedral symmetry \mathrm{T} , the rotation group for a regular tetrahedron and has the order of twelve.
- full tetrahedral symmetry \mathrm{T}_\mathrm{d} , the symmetry group for a regular tetrahedron and has the order of twenty-four.
- pyritohedral symmetry \mathrm{T}_\mathrm{h} , the symmetry of a pyritohedron and has the order of twenty-four.
- chiral octahedral symmetry \mathrm{O} , the rotation group of both cube and regular octahedron and has the order twenty-four.
- full octahedral symmetry \mathrm{O}_\mathrm{h} , the symmetry group of both cube and regular octahedron and has order forty-eight.
- chiral icosahedral symmetry \mathrm{I} , the rotation group of both regular icosahedron and regular dodecahedron and has the order of sixty.
- full icosahedral symmetry \mathrm{I}_\mathrm{h} , the symmetry group of both regular icosahedron and regular dodecahedron and has the order of a hundred-twenty.

Point groups in three dimensions may also allow the preservation of polyhedra's appearance by the circulation around an axis. There are three various of these point groups:
- pyramidal symmetry C_{n \mathrm{v}} , allowing rotate the axis passing through the apex and its base, as well as reflection relative to perpendicular planes passing through the bisector of a base. This point group symmetry can be found in pyramids, cupolas, and rotundas.
- prismatic symmetry D_{n\mathrm{h}} , similar to the pyramidal symmetry, but with additional transformation by reflecting it across a horizontal plane. This may be achieved from the family of prisms and its dual bipyramids.
- antiprismatic symmetry D_{n \mathrm{v}} , which preserves the symmetry by rotating its half bottom and reflection across the horizontal plane. Examples can be found in antiprisms. A point group C_{n \mathrm{h}} consists of rotating around the axis of symmetry and reflection on the horizontal plane. In the case of n = 1 , the symmetry group only preserves the symmetry by a full rotation solely, ordinarily denoting C_s .{{citation
Convex polyhedra
As mentioned above, the convex polyhedra are well-defined, with several equivalent standard definitions. They are often defined as bounded intersections of finitely many half-spaces, or as the convex hull of finitely many points,{{citation
The classes of convex polyhedra include the following:
- the family of prismatoid, polyhedra whose vertices lie on two parallel planes and whose faces are likely to be trapezoids and triangles.{{citation
- Platonic solids are the five ancient polyhedra—tetrahedron, octahedron, icosahedron, cube, and dodecahedron—described by Plato in the Timaeus. Archimedean solids are the class of thirteen polyhedra whose faces are all regular polygons and whose vertices are symmetric to each other;{{efn|The Archimedean solids once had fourteenth solid known as the pseudorhombicuboctahedron, a mistaken construction of the rhombicuboctahedron. However, it was debarred for not having the vertex-transitive property, leading it to be instead classified as a Johnson solid.{{citation
- Johnson solids are a class of 92 convex polyhedra whose faces are all regular polygons, excluding the uniform polyhedra, namely the Platonic and Archimedean solids, as well as the infinite families of prisms and antiprisms.{{citation
- SymmetrohedronSymmetrohedron is the family of infinitely many highly symmetric convex polyhedra, coined by Craig S. Kaplan and George W. Hart, containing regular polygonal faces on symmetry axes with gaps on the convex hull filled by irregular polygons. This involves three-dimensional symmetric groups of tetrahedral, octahedral, and icosahedral symmetry.{{citation | editor-last1 = Sarhangi | editor-first1 = Reza | editor-last2 = Jablan | editor-first2 = Slavik | chapter-url = https://archive.bridgesmathart.org/2001/bridges2001-21.html#gsc.tab=0
- Near-miss Johnson solid is a strictly convex polyhedron whose faces are close to being regular polygons, but some or all of which are not precisely regular. Thus, it fails to meet the definition of a Johnson solid, a polyhedron whose faces are all regular, though it "can often be physically constructed without noticing the discrepancy" between its regular and irregular faces.
- Goldberg polyhedron is a convex polyhedron with hexagonal and pentagonal faces. Described by , it is obtained from regular octahedron, regular tetrahedron, and regular icosahedron.{{citation | doi-access = free
Convex polyhedra can be categorized into elementary polyhedra or composite polyhedra. Elementary polyhedra are convex, regular-faced polyhedra that cannot be produced into two or more polyhedra by slicing them with a plane. Quite opposite to composite polyhedra, they can be alternatively defined as polyhedra constructed by attaching more elementary polyhedra. For example, triaugmented triangular prism is composite since it can be constructed by attaching three equilateral square pyramids onto the square faces of a triangular prism; the square pyramids and the triangular prism are elementaries.{{citation

Some convex polyhedra possess a midsphere, a sphere tangent to each of their edges, which is intermediate in radius between the insphere and circumsphere for polyhedra in which all these spheres are present. Every convex polyhedron is combinatorially equivalent to a canonical polyhedron, a polyhedron that has a midsphere whose center coincides with the centroid of its tangent points with edges. The shape of the canonical polyhedron (but not its scale or position) is uniquely determined by the combinatorial structure of the given polyhedron.{{citation
By forgetting the face structure, any polyhedron gives rise to a graph, called the skeleton of the polyhedron, with corresponding vertices and edges. Such figures have a long history: Leonardo da Vinci devised frame models of the regular solids, which he drew for Pacioli's book Divina Proportione, and similar wire-frame polyhedra appear in M.C. Escher's print Stars. One highlight of this approach is Steinitz's theorem, which gives a purely graph-theoretic characterization of the skeletons of convex polyhedra: it states that the skeleton of every convex polyhedron is a planar graph with three-connected, and every such graph is the skeleton of some convex polyhedron. In other words, these are the connected graphs that can be drawn in the plane without any edges crossing, and that stay connected after removing any two of its vertices.
Non-convex polyhedron Prominent non-convex polyhedra include the star polyhedra. The regular star polyhedra, also known as the Kepler–Poinsot polyhedra, are constructible via stellation or faceting of regular convex polyhedra. Stellation is the process of extending the faces (within their planes) so that they meet. Faceting is the process of removing parts of a polyhedron to create new faces (or facets) without creating any new vertices.{{citation | doi-access = free
Other families of polyhedra
Space-filling polyhedra

Main article: Space-filling polyhedron, Honeycomb (geometry)
A space-filling polyhedron is one that can be packed together with copies of itself to completely fill space. Such a close-packing or space-filling is often called a tessellation of space or a honeycomb. These include the parallelohedra (or Federov polyhedra), each of which forms a tessellation using copies of itself translated without rotation;{{citation
Some honeycombs involve more than one kind of polyhedron, such as a tiling of octahedra and tetrahedra and octahedra and cuboctahedra.{{citation
Flexible polyhedra
Main article: Flexible polyhedron
Some polyhedra can change their overall shape, while keeping the shapes of their faces the same, by varying the angles of their edges. A polyhedron that can do this is called a flexible polyhedron. By Cauchy's rigidity theorem, flexible polyhedra must be non-convex. The volume of a flexible polyhedron must remain constant as it flexes; this result is known as the bellows theorem.{{citation | title-link=Geometric Folding Algorithms | doi-access = free
Ideal polyhedron
Main article: Ideal polyhedron
Convex polyhedra can be defined in three-dimensional hyperbolic space in the same way as in Euclidean space, as the convex hulls of finite sets of points. However, in hyperbolic space, it is also possible to consider ideal points and the points within the space. An ideal polyhedron is the convex hull of a finite set of ideal points.{{citation
Lattice polyhedron
Convex polyhedra in which all vertices have integer coordinates are called lattice polyhedra or integral polyhedra. The Ehrhart polynomial of lattice a polyhedron counts how many points with integer coordinates lie within a scaled copy of the polyhedron, as a function of the scale factor. The study of these polynomials lies at the intersection of combinatorics and commutative algebra.{{citation
There is a far-reaching equivalence between lattice polyhedra and certain algebraic varieties called toric varieties. This was used by Stanley to prove the Dehn–Sommerville equations for simplicial polytopes.
Polyhedral compound
A polyhedral compound is made of two or more polyhedra sharing a common centre. Symmetrical compounds often share the same vertices as other well-known polyhedra and may often also be formed by stellation. Some are listed in the list of Wenninger polyhedron models.
Zonohedron
A zonohedron is a convex polyhedron in which every face is a polygon that is symmetric under rotations through 180°. Zonohedra can also be characterized as the Minkowski sums of line segments, and include several important space-filling polyhedra.{{citation
Orthogonal polyhedron
Main article: Orthogonal polyhedron

Orthogonal polyhedraPolyhedra are said to be orthogonal because all of their edges are parallel to the axes of a Cartesian coordinate system.{{citation | editor-last = Senechal | editor-first = Marjorie | contribution-url = https://books.google.com/books?id=kZtCAAAAQBAJ&pg=PA86
Generalisations
The name 'polyhedron' has come to be used for a variety of objects having similar structural properties to traditional polyhedra.
Apeirohedra
A classical polyhedral surface has a finite number of faces, joined in pairs along edges. The apeirohedra form a related class of objects with infinitely many faces. Examples of apeirohedra include:
- tilings or tessellations of the plane, and
- sponge-like structures called infinite skew polyhedra.
Complex polyhedra
Main article: Complex polytope
There are objects called complex polyhedra, for which the underlying space is a complex Hilbert space rather than real Euclidean space. Precise definitions exist only for the regular complex polyhedra, whose symmetry groups are complex reflection groups. The complex polyhedra are mathematically more closely related to configurations than to real polyhedra.{{citation
Curved polyhedra
Some fields of study allow polyhedra to have curved faces and edges. Curved faces can allow digonal faces to exist with a positive area.
- When the surface of a sphere is divided by finitely many great arcs (equivalently, by planes passing through the center of the sphere), the result is called a spherical polyhedron. Many convex polytopes having some degree of symmetry (for example, all the Platonic solids) can be projected onto the surface of a concentric sphere to produce a spherical polyhedron. However, the reverse process is not always possible; some spherical polyhedra (such as the hosohedra) have no flat-faced analogue.
- If faces are allowed to be concave as well as convex, adjacent faces may be made to meet together with no gap. Some of these curved polyhedra can pack together to fill space. Two important types are bubbles in froths and foams such as Weaire-Phelan bubbles,{{citation | editor-last = Mortensen | editor-first = Andreas
Higher-dimensional polyhedra
Main article: n-dimensional polyhedron
From the latter half of the twentieth century, various mathematical constructs have been found to have properties also present in traditional polyhedra. Rather than confining the term "polyhedron" to describe a three-dimensional polytope, it has been adopted to describe various related but distinct kinds of structure.
A polyhedron has been defined as a set of points in real affine (or Euclidean) space of any dimension n that has flat sides. It may alternatively be defined as the intersection of finitely many half-spaces. Unlike a conventional polyhedron, it may be bounded or unbounded. In this meaning, a polytope is a bounded polyhedron.
Analytically, such a convex polyhedron is expressed as the solution set for a system of linear inequalities. Defining polyhedra in this way provides a geometric perspective for problems in linear programming.{{citation
History
Before the Greeks
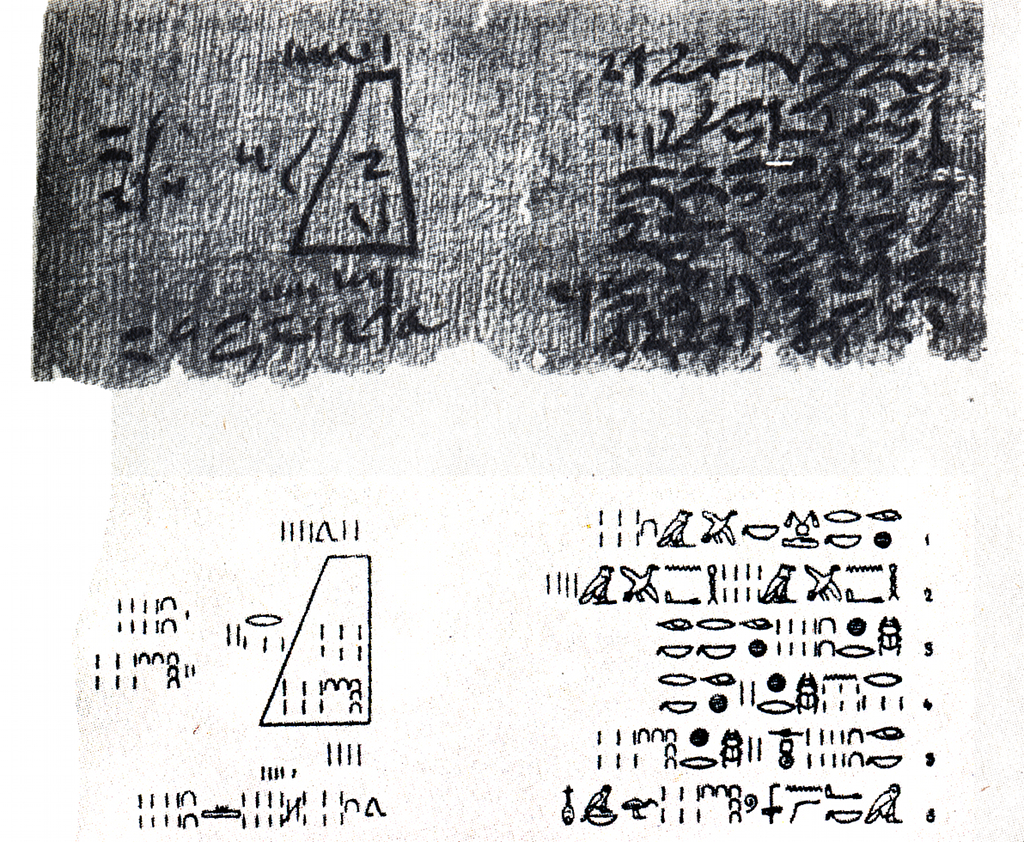
Polyhedra appeared in early architectural forms such as cubes and cuboids, with the earliest four-sided Egyptian pyramids dating from the 27th century BC. The Moscow Mathematical Papyrus from approximately 1800–1650 BC includes an early written study of polyhedra and their volumes (specifically, the volume of a frustum). The mathematics of the Old Babylonian Empire, from roughly the same time period as the Moscow Papyrus, also included calculations of the volumes of cuboids (and of non-polyhedral cylinders), and calculations of the height of such a shape needed to attain a given volume.
The Etruscans preceded the Greeks in their awareness of at least some of the regular polyhedra, as evidenced by the discovery of an Etruscan dodecahedron made of soapstone on Monte Loffa. Its faces were marked with different designs, suggesting to some scholars that it may have been used as a gaming die.
Ancient Greece
Ancient Greek mathematicians discovered and studied the convex regular polyhedra, which came to be known as the Platonic solids. Their first written description is in the Timaeus of Plato (circa 360 BC), which associates four of them with the four elements and the fifth to the overall shape of the universe. A more mathematical treatment of these five polyhedra was written soon after in the Elements of Euclid. An early commentator on Euclid (possibly Geminus) writes that the attribution of these shapes to Plato is incorrect: Pythagoras knew the tetrahedron, cube, and dodecahedron, and Theaetetus (circa 417 BC) discovered the other two, the octahedron and icosahedron. Later, Archimedes expanded his study to the convex uniform polyhedra which now bear his name. His original work is lost and his solids come down to us through Pappus.
Ancient China

Both cubical dice and 14-sided dice in the shape of a truncated octahedron in China have been dated back as early as the Warring States period.{{citation
By 236 AD, Liu Hui was describing the dissection of the cube into its characteristic tetrahedron (orthoscheme) and related solids, using assemblages of these solids as the basis for calculating volumes of earth to be moved during engineering excavations.{{citation
Medieval Islam
After the end of the Classical era, scholars in the Islamic civilisation continued to take the Greek knowledge forward (see Mathematics in medieval Islam). The 9th century scholar Thabit ibn Qurra included the calculation of volumes in his studies, and wrote a work on the cuboctahedron. Then in the 10th century Abu'l Wafa described the convex regular and quasiregular spherical polyhedra.
Renaissance
As with other areas of Greek thought maintained and enhanced by Islamic scholars, Western interest in polyhedra revived during the Italian Renaissance. Artists constructed skeletal polyhedra, depicting them from life as a part of their investigations into perspective. Toroidal polyhedra, made of wood and used to support headgear, became a common exercise in perspective drawing, and were depicted in marquetry panels of the period as a symbol of geometry. Piero della Francesca wrote about constructing perspective views of polyhedra, and rediscovered many of the Archimedean solids. Leonardo da Vinci illustrated skeletal models of several polyhedra for a book by Luca Pacioli, with text largely plagiarized from della Francesca. Polyhedral nets make an appearance in the work of Albrecht Dürer.
Several works from this time investigate star polyhedra and other elaborations of the basic Platonic forms. A marble tarsia in the floor of St. Mark's Basilica, Venice, designed by Paolo Uccello, depicts a stellated dodecahedron. As the Renaissance spread beyond Italy, later artists such as Wenzel Jamnitzer, Dürer and others also depicted polyhedra of increasing complexity, many of them novel, in imaginative etchings.
In the same period, Euler's polyhedral formula, a linear equation relating the numbers of vertices, edges, and faces of a polyhedron, was stated for the Platonic solids in 1537 in an unpublished manuscript by Francesco Maurolico.
17th–19th centuries
René Descartes, in around 1630, wrote his book De solidorum elementis studying convex polyhedra as a general concept, not limited to the Platonic solids and their elaborations. The work was lost, and not rediscovered until the 19th century. One of its contributions was Descartes' theorem on total angular defect, which is closely related to Euler's polyhedral formula. Leonhard Euler, for whom the formula is named, introduced it in 1758 for convex polyhedra more generally, albeit with an incorrect proof.{{citation
In the early 19th century, Louis Poinsot extended Kepler's work, and discovered the remaining two regular star polyhedra. Soon after, Augustin-Louis Cauchy proved Poinsot's list complete, subject to an unstated assumption that the sequence of vertices and edges of each polygonal side cannot admit repetitions (an assumption that had been considered but rejected in the earlier work of A. F. L. Meister). They became known as the Kepler–Poinsot polyhedra, and their usual names were given by Arthur Cayley. Meanwhile, the discovery of higher dimensions in the early 19th century led Ludwig Schläfli by 1853 to the idea of higher-dimensional polytopes. Additionally, in the late 19th century, Russian crystallographer Evgraf Fedorov completed the classification of parallelohedra, convex polyhedra that tile space by translations.
20th–21st centuries
Mathematics in the 20th century dawned with Hilbert's problems, one of which, Hilbert's third problem, concerned polyhedra and their dissections. It was quickly solved by Hilbert's student Max Dehn, introducing the Dehn invariant of polyhedra.{{citation
The Kepler–Poinsot polyhedra may be constructed from the Platonic solids by a process called stellation. Most stellations are not regular. The study of stellations of the Platonic solids was given a big push by H.S.M. Coxeter and others in 1938, with the now famous paper The Fifty-Nine Icosahedra.{{citation | orig-date = 1938 | title-link = The Fifty-Nine Icosahedra
In the second part of the twentieth century, both Branko Grünbaum and Imre Lakatos pointed out the tendency among mathematicians to define a "polyhedron" in different and sometimes incompatible ways to suit the needs of the moment.
Polyhedra have been discovered in many fields of science. The Platonic solids appeared in biological creatures, as in The Braarudosphaera bigelowii has a regular dodecahedral structure.{{citation | article-number = e81749 | doi-access = free
Polyhedra make a frequent appearance in modern computational geometry, computer graphics, and geometric design with topics including the reconstruction of polyhedral surfaces or surface meshes from scattered data points,{{citation | editor-last = Whitton | editor-first = Mary C. | editor-link = Mary Whitton | editor1-last = van Kreveld | editor1-first = Marc J. | editor2-last = Speckmann | editor2-first = Bettina
Notes
References
References
- Coxeter, H. S. M.. (1939). "The regular sponges, or skew polyhedra". [[Scripta Mathematica]].
- Loeb, Arthur L.. (2013). "Shaping Space: Exploring Polyhedra in Nature, Art, and the Geometrical Imagination". Springer.
- McCormack, Joseph P.. (1931). "Solid Geometry". D. Appleton-Century Company.
- (2000). "Computational Geometry: Algorithms and Applications". Springer.
- Matveev, S.V.. "Polyhedron, abstract".
- Stewart, B. M.. (1980). "Adventures Among the Toroids: A study of orientable polyhedra with regular faces".
- O'Rourke, Joseph. (1993). "Computational Geometry in C". Cambridge University Press.
- Grünbaum, Branko. (2003). "Discrete and Computational Geometry: The Goodman–Pollack Festschrift". Springer.
- Peirce, Charles S.. (1976). "The New Elements of Mathematics, Volume II: Algebra and Geometry". Mouton Publishers & Humanities Press.
- (2020). "Crystal Structures: Patterns and Symmetry". Dover Publications.
- Stewart, B. M.. (1980). "Adventures Among the Toroids: A Study of Orientable Polyhedra with Regular Faces". B. M. Stewart.
- Coxeter, H. S. M.. (1947). "Regular Polytopes". Methuen.
- Peterson, Dave. (September 17, 2020). "Counting Diagonals of a Polyhedron".
- Goldman, Ronald N.. (1991). "Graphic Gems Package: Graphics Gems II". Academic Press.
- (2000). "Polytopes — Combinatorics and Computation".
- Sydler, J.-P.. (1965). "Conditions nécessaires et suffisantes pour l'équivalence des polyèdres de l'espace euclidien à trois dimensions". [[Commentarii Mathematici Helvetici.
- Hazewinkel, M.. "Dehn invariant".
- Lawson-Perfect, Christian. (13 October 2013). "An enneahedron for Herschel".
- Coxeter, H. S. M.. (1948). "[[Regular Polytopes (book)". Methuen.
- Coxeter, H.S.M.. (1985). "A special book review: M.C. Escher: His life and complete graphic work". The Mathematical Intelligencer.
- Cox, David A.. (2011). "Toric varieties". American Mathematical Society.
- Stanley, Richard P.. (1996). "Combinatorics and commutative algebra". Birkhäuser.
- Popko, Edward S.. (2012). "Divided Spheres: Geodesics and the Orderly Subdivision of the Sphere". CRC Press.
- Pearce, P.. (1978). "Structure in nature is a strategy for design". MIT Press.
- Kitchen, K. A.. (October 1991). "The chronology of ancient Egypt". World Archaeology.
- (May 1929). "Four Geometrical Problems from the Moscow Mathematical Papyrus". The Journal of Egyptian Archaeology.
- Friberg, Jöran. (2000). "Mathematics at Ur in the Old Babylonian Period". Revue d'Assyriologie et d'archéologie orientale.
- Sparavigna, Amelia Carolina. (2012). "An Etruscan dodecahedron".
- Eves, Howard. (January 1969). "A geometry capsule concerning the five platonic solids". The Mathematics Teacher.
- Field, J. V.. (1997). "Rediscovering the Archimedean polyhedra: Piero della Francesca, Luca Pacioli, Leonardo da Vinci, Albrecht Dürer, Daniele Barbaro, and Johannes Kepler". Archive for History of Exact Sciences.
- Knorr, Wilbur. (1983). "On the transmission of geometry from Greek into Arabic". Historia Mathematica.
- Rashed, Roshdi. (2009). "Thābit ibn Qurra: Science and Philosophy in Ninth-Century Baghdad". Walter de Gruyter.
- (December 2017). "The geometry of cuboctahedra in medieval art in Anatolia". Nexus Network Journal.
- Gamba, Enrico. (2012). "Imagine Math". Springer.
- Andrews, Noam. (2022). "The Polyhedrists: Art and Geometry in the Long Sixteenth Century". MIT Press.
- (February 2010). "Perspective versus stereotomy: From Quattrocento polyhedral rings to sixteenth-century Spanish torus vaults". Nexus Network Journal.
- Field, J. V.. (1997). "Rediscovering the Archimedean polyhedra: Piero della Francesca, Luca Pacioli, Leonardo da Vinci, Albrecht Dürer, Daniele Barbaro, and Johannes Kepler". [[Archive for History of Exact Sciences]].
- Montebelli, Vico. (2015). "Luca Pacioli and perspective (part I)". Lettera Matematica.
- Ghomi, Mohammad. (2018). "Dürer's unfolding problem for convex polyhedra". [[Notices of the American Mathematical Society]].
- Saffaro, Lucio. (1992). "Fullerenes: Status and Perspectives, Proceedings of the 1st Italian Workshop, Bologna, Italy, 6–7 February". World Scientific.
- Field, J. V.. (1979). "Kepler's star polyhedra". Vistas in Astronomy.
- Friedman, Michael. (2018). "A History of Folding in Mathematics: Mathematizing the Margins". Birkhäuser.
- Federico, Pasquale Joseph. (1982). "Descartes on Polyhedra: A Study of the "De solidorum elementis"". Springer-Verlag.
- Eckmann, Beno. (2006). "Mathematical Survey Lectures 1943–2004". Springer.
- Grünbaum, Branko. (1994). "Companion Encyclopedia of the History and Philosophy of the Mathematical Sciences". Routledge.
- Austin, David. (November 2013). "Fedorov's five parallelohedra". American Mathematical Society.
- Roberts, Siobhan. (2009). "King of Infinite Space: Donald Coxeter, the Man Who Saved Geometry". Bloomsbury Publishing.
- (2002). "Abstract Regular Polytopes". Cambridge University Press.
- Cherchi, Gianmarco. (February 2019). "Polycube Optimization and Applications: From the Digital World to Manufacturing". University of Cagliari.
- (2007). "Geometric Folding Algorithms: Linkages, Origami, Polyhedra". Cambridge University Press.
This article was imported from Wikipedia and is available under the Creative Commons Attribution-ShareAlike 4.0 License. Content has been adapted to SurfDoc format. Original contributors can be found on the article history page.
Ask Mako anything about Polyhedron — get instant answers, deeper analysis, and related topics.
Research with MakoFree with your Surf account
Create a free account to save articles, ask Mako questions, and organize your research.
Sign up freeThis content may have been generated or modified by AI. CloudSurf Software LLC is not responsible for the accuracy, completeness, or reliability of AI-generated content. Always verify important information from primary sources.
Report