From Surf Wiki (app.surf) — the open knowledge base
Complex quadratic polynomial
Quadratic polynomial

Quadratic polynomial
A complex quadratic polynomial is a quadratic polynomial whose coefficients and variable are complex numbers.
Properties
Quadratic polynomials have the following properties, regardless of the form:
- It is a unicritical polynomial, i.e. it has one finite critical point in the complex plane, Dynamical plane consist of maximally 2 basins: the basin of infinity and basin of the finite critical point (if the finite critical point does not escape)
- It can be postcritically finite, i.e. the orbit of the critical point can be finite, because the critical point is periodic or preperiodic.
- It is a unimodal function,
- It is a rational function,
- It is an entire function.
Forms
When the quadratic polynomial has only one variable (univariate), one can distinguish its four main forms:
- The general form: f(x) = a_2 x^2 + a_1 x + a_0 where a_2 \ne 0
- The factored form used for the logistic map: f_r(x) = r x (1-x)
- f_{\theta}(x) = x^2 +\lambda x which has an indifferent fixed point with multiplier \lambda = e^{2 \pi \theta i} at the origin
- The monic and centered form, f_c(x) = x^2 +c
The monic and centered form has been studied extensively, and has the following properties:
- It is the simplest form of a nonlinear function with one coefficient (parameter),
- It is a centered polynomial (the sum of its critical points is zero).
- it is a binomial
The lambda form f_{\lambda}(z) = z^2 +\lambda z is:
- the simplest non-trivial perturbation of unperturbated system z \mapsto \lambda z
- "the first family of dynamical systems in which explicit necessary and sufficient conditions are known for when a small divisor problem is stable"
Conjugation
Between forms
Since f_c(x) is affine conjugate to the general form of the quadratic polynomial it is often used to study complex dynamics and to create images of Mandelbrot, Julia and Fatou sets.
When one wants change from \theta to c:
:c = c(\theta) = \frac {e^{2 \pi \theta i}}{2} \left(1 - \frac {e^{2 \pi \theta i}}{2}\right).
When one wants change from r to c, the parameter transformation is : c = c(r) = \frac{1- (r-1)^2}{4} = -\frac{r}{2} \left(\frac{r-2}{2}\right)
and the transformation between the variables in z_{t+1}=z_t^2+c and x_{t+1}=rx_t(1-x_t) is
:z=r\left(\frac{1}{2}-x\right).
With doubling map
There is semi-conjugacy between the dyadic transformation (the doubling map) and the quadratic polynomial case of c = –2.
Notation
Iteration
Here f^n denotes the n-th iterate of the function f:
:f_c^n(z) = f_c^1(f_c^{n-1}(z))
so
:z_n = f_c^n(z_0).
Because of the possible confusion with exponentiation, some authors write f^{\circ n} for the nth iterate of f.
Parameter
The monic and centered form f_c(x) = x^2 +c can be marked by:
- the parameter c
- the external angle \theta of the ray that lands:
- at c in Mandelbrot set on the parameter plane
- on the critical value:z = c in Julia set on the dynamic plane
so :
:f_c = f_{\theta}
:c = c({\theta})
Examples:
- c is the landing point of the 1/6 external ray of the Mandelbrot set, and is z \to z^2+i (where i^2=-1)
- c is the landing point the 5/14 external ray and is z \to z^2+ c with c = -1.23922555538957 + 0.412602181602004*i
Paritition of dynamic plane of quadratic polynomial for 1 4.svg|1/4 Paritition of dynamic plane of quadratic polynomial for 1 6.svg|1/6 Paritition of dynamic plane of quadratic polynomial for 9 56.svg|9/56 Paritition of dynamic plane of quadratic polynomial for 129 over 16256.svg|129/16256
Map
The monic and centered form, sometimes called the Douady-Hubbard family of quadratic polynomials, is typically used with variable z and parameter c:
:f_c(z) = z^2 +c.
When it is used as an evolution function of the discrete nonlinear dynamical system
: z_{n+1} = f_c(z_n)
it is named the quadratic map:
:f_c : z \to z^2 + c.
The Mandelbrot set is the set of values of the parameter c for which the initial condition z0 = 0 does not cause the iterates to diverge to infinity.
Critical items
Critical points
complex plane
A critical point of f_c is a point z_{cr} on the dynamical plane such that the derivative vanishes:
: f_c'(z_{cr}) = 0.
Since
: f_c'(z) = \frac{d}{dz}f_c(z) = 2z
implies
: z_{cr} = 0,
we see that the only (finite) critical point of f_c is the point z_{cr} = 0.
z_0 is an initial point for Mandelbrot set iteration.
For the quadratic family f_c(z)=z^2+c the critical point z = 0 is the center of symmetry of the Julia set Jc, so it is a convex combination of two points in Jc.
Extended complex plane
In the Riemann sphere polynomial has 2d-2 critical points. Here zero and infinity are critical points.
Critical value
A critical value z_{cv} of f_c is the image of a critical point:
: z_{cv} = f_c(z_{cr})
Since
: z_{cr} = 0
we have
: z_{cv} = c
So the parameter c is the critical value of f_c(z).
Critical level curves
A critical level curve the level curve which contain critical point. It acts as a sort of skeleton of dynamical plane
Example : level curves cross at saddle point, which is a special type of critical point.
Julia set for z^2+0.7i*z.png|attracting IntLSM_J.jpg| attracting ILSMJ.png| attracting Level sets of attraction time to parabolic fixed point in the fat basilica Julia set.png|parabolic Quadratic Julia set with Internal level sets for internal ray 0.ogv| Video for c along internal ray 0
Critical limit set
Critical limit set is the set of forward orbit of all critical points
Critical orbit



The forward orbit of a critical point is called a critical orbit. Critical orbits are very important because every attracting periodic orbit attracts a critical point, so studying the critical orbits helps us understand the dynamics in the Fatou set.
:z_0 = z_{cr} = 0
:z_1 = f_c(z_0) = c
:z_2 = f_c(z_1) = c^2 +c
:z_3 = f_c(z_2) = (c^2 + c)^2 + c
::\ \vdots
This orbit falls into an attracting periodic cycle if one exists.
Critical sector
The critical sector is a sector of the dynamical plane containing the critical point.
Critical set
Critical set is a set of critical points
Critical polynomial
:P_n(c) = f_c^n(z_{cr}) = f_c^n(0)
so
:P_0(c)= 0
:P_1(c) = c
:P_2(c) = c^2 + c
:P_3(c) = (c^2 + c)^2 + c
These polynomials are used for:
-
finding centers of these Mandelbrot set components of period n. Centers are roots of n-th critical polynomials ::\text{centers} = { c : P_n(c) = 0 }
-
finding roots of Mandelbrot set components of period n (local minimum of P_n(c))
-
Misiurewicz points
Critical curves
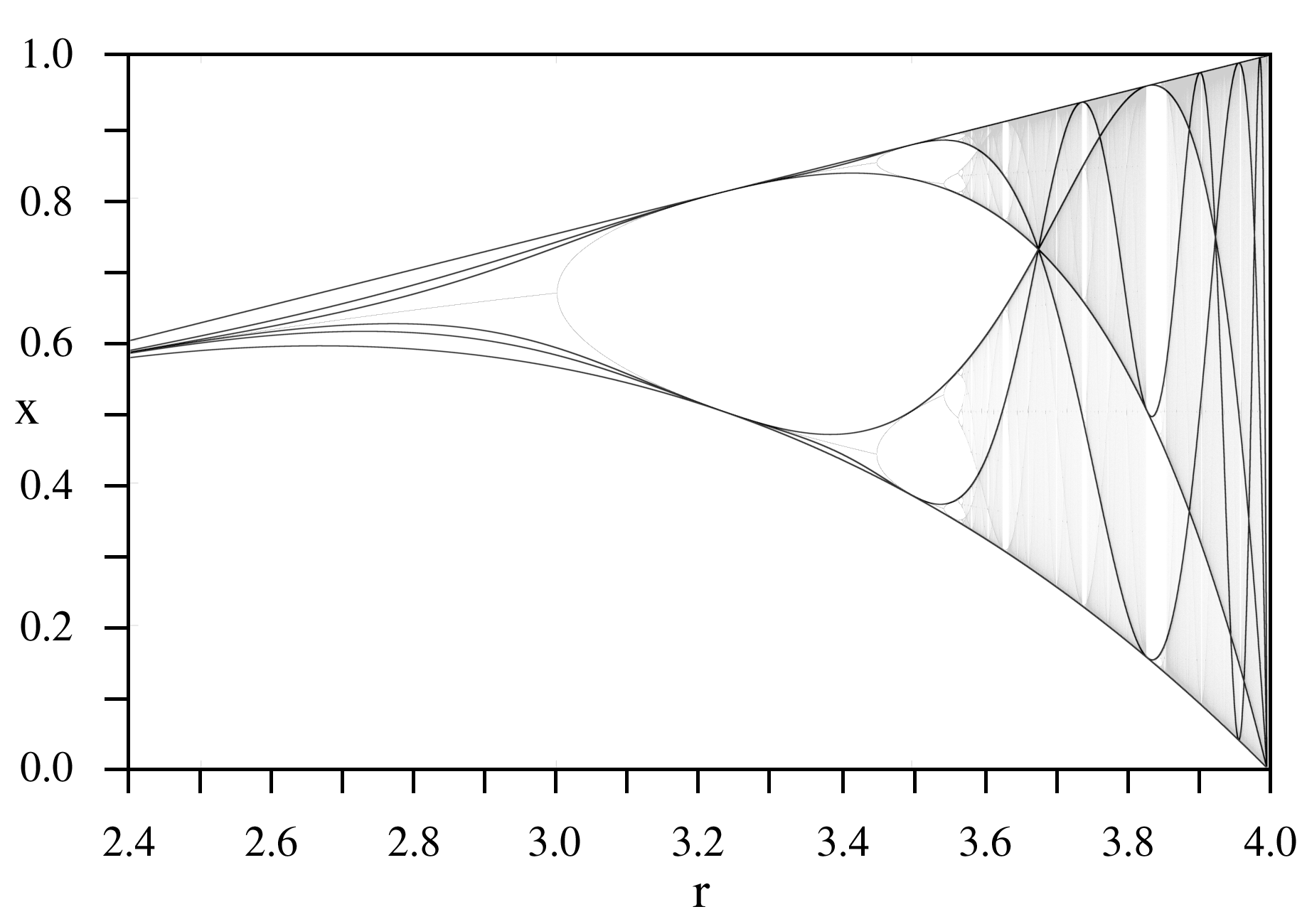
Diagrams of critical polynomials are called critical curves.The Road to Chaos is Filled with Polynomial Curves by Richard D. Neidinger and R. John Annen III. American Mathematical Monthly, Vol. 103, No. 8, October 1996, pp. 640–653
These curves create the skeleton (the dark lines) of a bifurcation diagram.{{Cite book | author-link = Bailin Hao | access-date = 2 December 2009 | archive-url = https://web.archive.org/web/20091205014855/http://power.itp.ac.cn/~hao/ | archive-date = 5 December 2009 | url-status = dead
Spaces, planes
4D space
One can use the Julia-Mandelbrot 4-dimensional (4D) space for a global analysis of this dynamical system.

In this space there are two basic types of 2D planes:
- the dynamical (dynamic) plane, f_c-plane or c-plane
- the parameter plane or z-plane
There is also another plane used to analyze such dynamical systems w-plane:
- the conjugation plane
- model plane
2D Parameter plane
MandelbrotLambda.jpg|r parameter plane (logistic map) MandelbrotMuDouadyRabbit.jpg| c parameter plane
The phase space of a quadratic map is called its parameter plane. Here:
z_0 = z_{cr} is constant and c is variable.
There is no dynamics here. It is only a set of parameter values. There are no orbits on the parameter plane.
The parameter plane consists of:
- The Mandelbrot set
- The bifurcation locus = boundary of Mandelbrot set with
- root points
- Bounded hyperbolic components of the Mandelbrot set = interior of Mandelbrot set with internal rays
- The bifurcation locus = boundary of Mandelbrot set with
- exterior of Mandelbrot set with
- external rays
- equipotential lines
There are many different subtypes of the parameter plane.

See also :
- Boettcher map which maps exterior of Mandelbrot set to the exterior of unit disc
- multiplier map which maps interior of hyperbolic component of Mandelbrot set to the interior of unit disc
2D Dynamical plane
"The polynomial Pc maps each dynamical ray to another ray doubling the angle (which we measure in full turns, i.e. 0 = 1 = 2π rad = 360°), and the dynamical rays of any polynomial "look like straight rays" near infinity. This allows us to study the Mandelbrot and Julia sets combinatorially, replacing the dynamical plane by the unit circle, rays by angles, and the quadratic polynomial by the doubling modulo one map." Virpi KaukoOn the dynamical plane one can find:
- The Julia set
- The Filled Julia set
- The Fatou set
- Orbits
The dynamical plane consists of:
- Fatou set
- Julia set
Here, c is a constant and z is a variable.
The two-dimensional dynamical plane can be treated as a Poincaré cross-section of three-dimensional space of continuous dynamical system.
Dynamical z-planes can be divided into two groups:
- f_0 plane for c = 0 (see complex squaring map)
- f_c planes (all other planes for c \ne 0)
===Riemann sphere === The extended complex plane plus a point at infinity
- the Riemann sphere
==Derivatives==
===First derivative with respect to c=== On the parameter plane:
- c is a variable
- z_0 = 0 is constant
The first derivative of f_c^n(z_0) with respect to c is
: z_n' = \frac{d}{dc} f_c^n(z_0).
This derivative can be found by iteration starting with
: z_0' = \frac{d}{dc} f_c^0(z_0) = 1
and then replacing at every consecutive step
: z_{n+1}' = \frac{d}{dc} f_c^{n+1}(z_0) = 2\cdot{}f_c^n(z)\cdot\frac{d}{dc} f_c^n(z_0) + 1 = 2 \cdot z_n \cdot z_n' +1.
This can easily be verified by using the chain rule for the derivative.
This derivative is used in the distance estimation method for drawing a Mandelbrot set.
===First derivative with respect to z=== On the dynamical plane:
- z is a variable;
- c is a constant.
At a fixed point z_0,
: f_c'(z_0) = \frac{d}{dz}f_c(z_0) = 2z_0 .
At a** periodic point** z0 of period p the first derivative of a function
: (f_c^p)'(z_0) = \frac{d}{dz}f_c^p(z_0) = \prod_{i=0}^{p-1} f_c'(z_i) = 2^p \prod_{i=0}^{p-1} z_i = \lambda
is often represented by \lambda and referred to as the multiplier or the Lyapunov characteristic number. Its logarithm is known as the Lyapunov exponent. Absolute value of multiplier is used to check the stability of periodic (also fixed) points.
At a nonperiodic point, the derivative, denoted by z'_n, can be found by iteration starting with
: z'_0 = 1,
and then using
:z'n= 2*z{n-1}*z'_{n-1}.
This derivative is used for computing the external distance to the Julia set.
===Schwarzian derivative=== The Schwarzian derivative (SD for short) of f is:
: (Sf)(z) = \frac{f'(z)}{f'(z)} - \frac{3}{2} \left ( \frac{f(z)}{f'(z)}\right ) ^2 .
==See also== *Misiurewicz point *Periodic points of complex quadratic mappings *Mandelbrot set *Julia set *Milnor–Thurston kneading theory *Tent map *Logistic map
==References==
==External links==
*Monica Nevins and Thomas D. Rogers, "Quadratic maps as dynamical systems on the p-adic numbers" *Wolf Jung : Homeomorphisms on Edges of the Mandelbrot Set. Ph.D. thesis of 2002 *More about Quadratic Maps : Quadratic Map
[[Category:Complex dynamics]] [[Category:Fractals]] [[Category:Polynomials]]
References
- (1993). "On postcritically finite polynomials, part 1: Critical portraits".
- "Michael Yampolsky, Saeed Zakeri : Mating Siegel quadratic polynomials.".
- [[Bodil Branner]]: Holomorphic dynamical systems in the complex plane. Mat-Report No 1996-42. Technical University of Denmark
- Dynamical Systems and Small Divisors, Editors: Stefano Marmi, Jean-Christophe Yoccoz, page 46
- "Show that the familiar logistic map $x_{n+1} = sx_n(1 - x_n)$, can be recoded into the form $x_{n+1} = x_n^2 + c$.".
- [http://qcpages.qc.cuny.edu/~yjiang/HomePageYJ/Download/2004MandLocConn.pdf Yunping Jing : Local connectivity of the Mandelbrot set at certain infinitely renormalizable points ] Complex Dynamics and Related Topics, New Studies in Advanced Mathematics, 2004, The International Press, 236-264
- Weisstein, Eric W.. "Quadratic Map".
- link. (26 April 2012)
- "Convex Julia sets".
- Richards, Trevor. (11 May 2015). "Conformal equivalence of analytic functions on compact sets".
- [http://www.iec.csic.es/~miguel/miguel.html M. Romera] {{webarchive. link. (22 June 2008 , [http://www.iec.csic.es/~gerardo/Gerardo.html G. Pastor] {{webarchive). link. (1 May 2008 , and F. Montoya : [http://www.iec.csic.es/~miguel/Preprint4.ps Multifurcations in nonhyperbolic fixed points of the Mandelbrot map.] {{webarchive). link. (11 December 2009 [http://users.utcluj.ro/~mdanca/fractalia/ Fractalia] {{webarchive). link. (19 September 2008 6, No. 21, 10-12 (1997))
- [https://web.archive.org/web/20041031082406/http://myweb.cwpost.liu.edu/aburns/index.html Burns A M] : Plotting the Escape: An Animation of Parabolic Bifurcations in the Mandelbrot Set. Mathematics Magazine, Vol. 75, No. 2 (Apr., 2002), pp. 104–116
- "Khan Academy".
- "M. Romera, G. Pastor and F. Montoya, "Misiurewicz points in one-dimensional quadratic maps", Physica A, 232 (1996), 517-535. Preprint".
- "Julia-Mandelbrot Space, Mu-Ency at MROB".
- Carleson, Lennart, Gamelin, Theodore W.: Complex Dynamics Series: Universitext, Subseries: Universitext: Tracts in Mathematics, 1st ed. 1993. Corr. 2nd printing, 1996, IX, 192 p. 28 illus., {{ISBN. 978-0-387-97942-7
- Holomorphic motions and puzzels by P Roesch
- (12 May 2008). "Bifurcation Loci of Exponential Maps and Quadratic Polynomials: Local Connectivity, Triviality of Fibers, and Density of Hyperbolicity".
- "Julia and Mandelbrot sets, alternate planes".
- "Exponential Map, Mu-Ency at MROB".
- [http://matwbn.icm.edu.pl/ksiazki/fm/fm164/fm16413.pdf Trees of visible components in the Mandelbrot set by Virpi K a u k o , FUNDAM E N TA MATHEMATICAE 164 (2000)]
- "The Mandelbrot Set is named after mathematician Benoit B".
- [http://www.scholarpedia.org/article/Periodic_orbit#Stability_of_a_Periodic_Orbit. Jeff Moehlis, Kresimir Josic, Eric T. Shea-Brown (2006) Periodic orbit. Scholarpedia],
- "Lecture Notes | Mathematical Exposition | Mathematics".
This article was imported from Wikipedia and is available under the Creative Commons Attribution-ShareAlike 4.0 License. Content has been adapted to SurfDoc format. Original contributors can be found on the article history page.
Ask Mako anything about Complex quadratic polynomial — get instant answers, deeper analysis, and related topics.
Research with MakoFree with your Surf account
Create a free account to save articles, ask Mako questions, and organize your research.
Sign up freeThis content may have been generated or modified by AI. CloudSurf Software LLC is not responsible for the accuracy, completeness, or reliability of AI-generated content. Always verify important information from primary sources.
Report